
- Description
- Related Files
- Discussion
FC specification
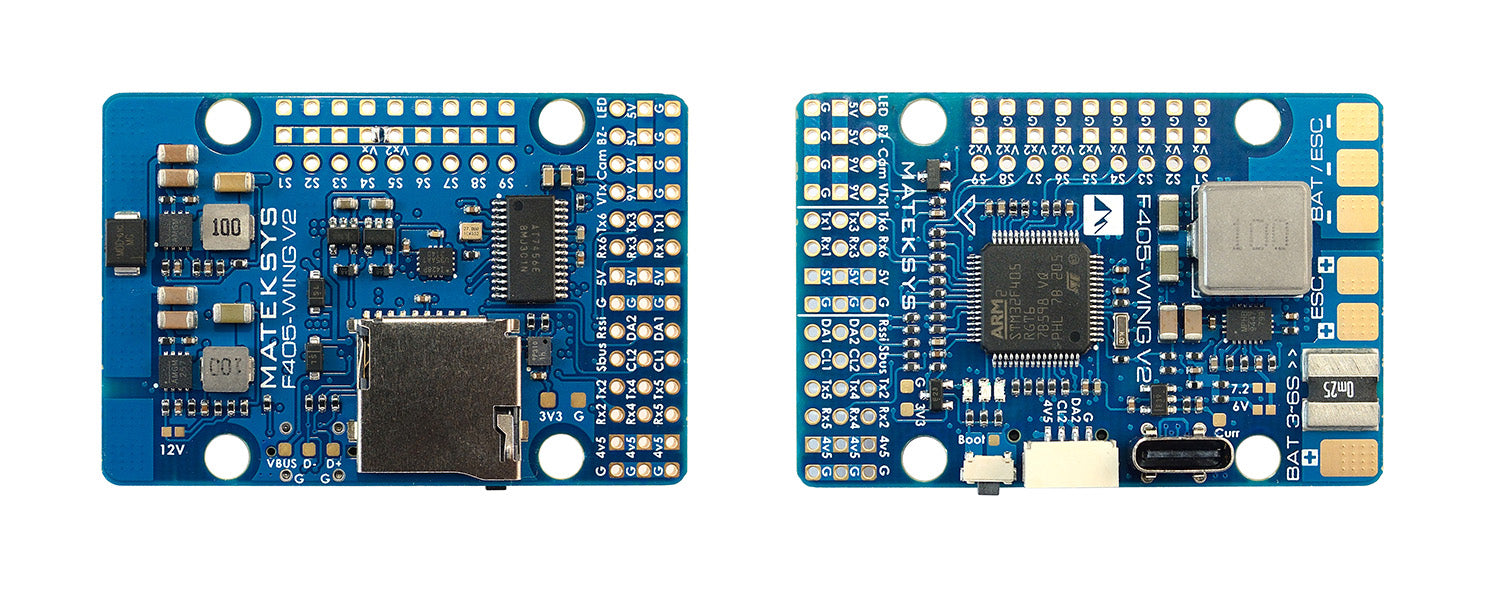
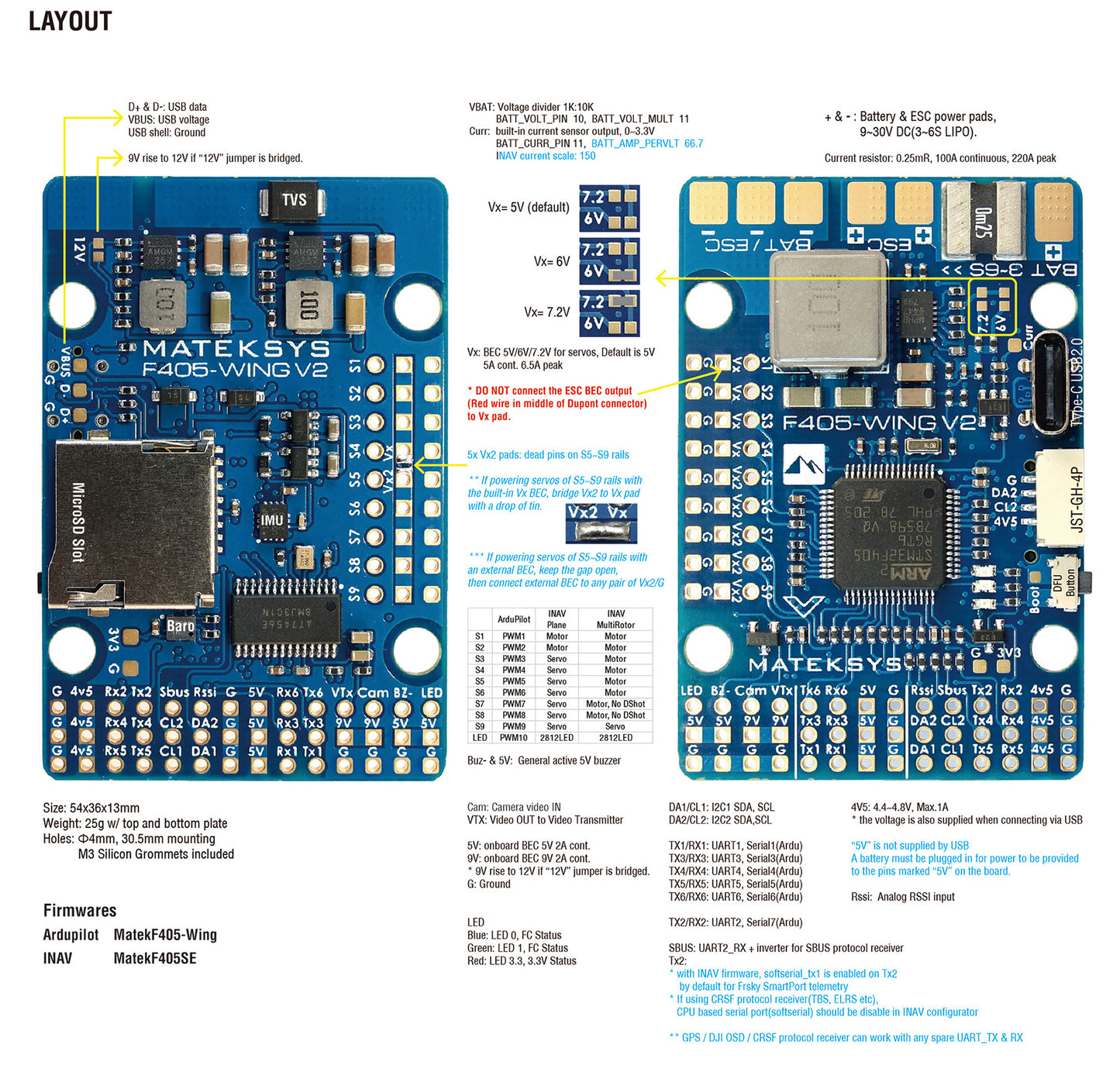
MCU: STM32F405RGT6, 168MHz, 1MB Flash
IMU: ICM42688-P
Barometer: DPS310
OSD: AT7456E
Blackbox: MicroSD card slot
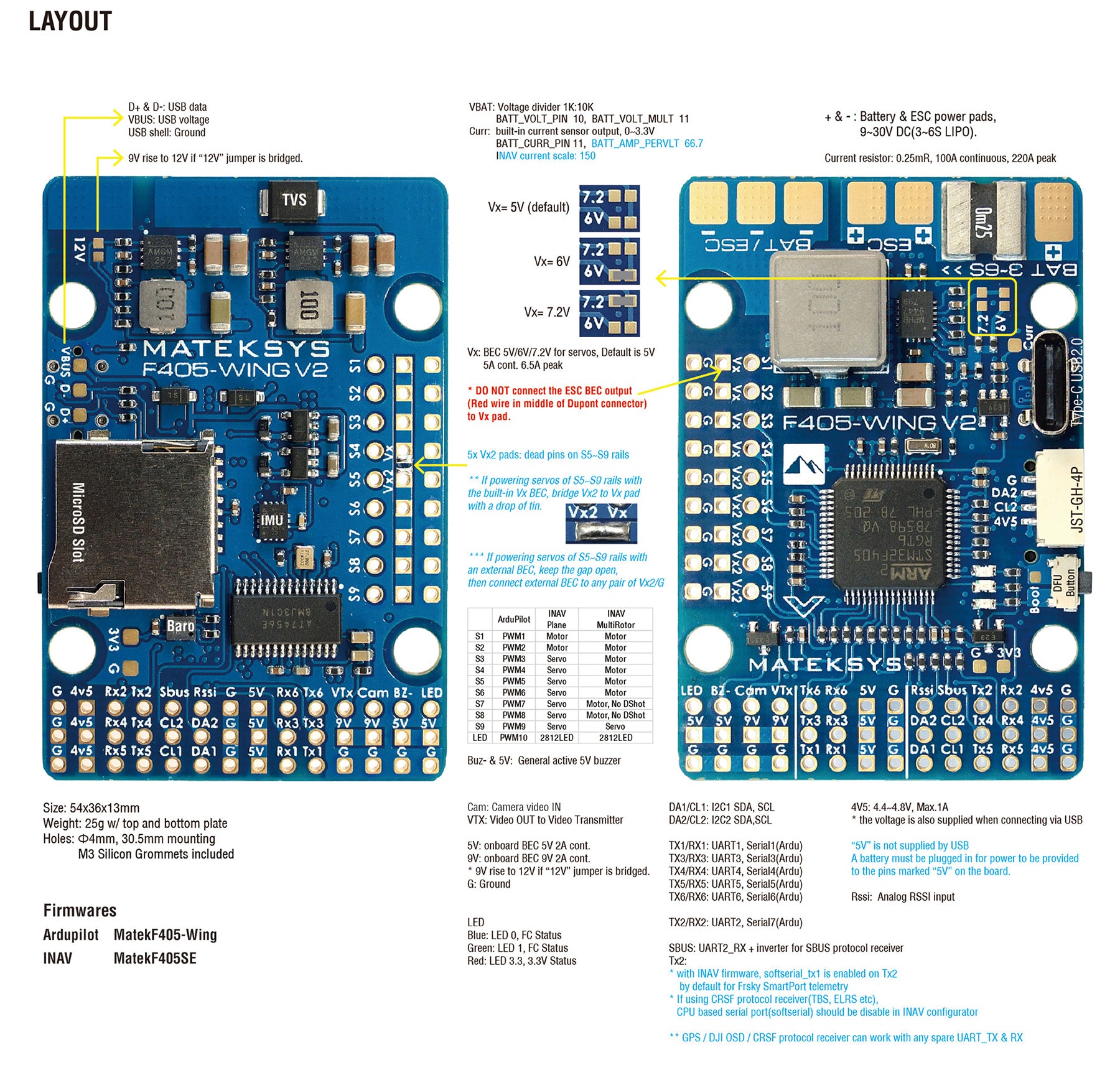
6x UART, 1x Softserial_Tx option (INAV)
10x PWM outputs
2x I2C
3x ADC (VBAT, Current, RSSI)
Built-in inverter for SBUS input
USB Type-C (USB 2.0)
Firmware FC
ArduPilot: MatekF405-Wing (ArduPlane 4.4 or later)
INAV: MATEKF405SE (INAV 6.0 or later)
PDB
Input voltage: 9~30V (3~6S LiPo) with TVS protection
Current sensor: 220A, 3.3V ADC (INAV scale 150, ArduPilot 66.7A/V)
Sensor resistor: 100A continuous, 220A peak
Battery voltage divider 1K:10K (Scale 1100 v INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
BEC 5V output
Designed for flight controller, receiver, OSD, camera, buzzer, 2812 LED strip, buzzer, GPS module, air speed sensor
Continuous current: 2A
BEC 9V / 12V output
Designed for video transmitter, camera, gimbal etc.
Continuous current: 2 A
12V option with jumper
For stable 9V/12V output, input voltage should be higher than +1V output voltage
BEC Vx output
Designed for servos
Adjustable voltage, 5V default, 6V or 7.2V options
Continuous current: 5A, peak current 6A
For stable Vx output, input voltage should be higher than Vx voltage +1V
BEC 3.3V output
Designed for external 3.3V peripherals
Linear regulator
Continuous current: 200 mA
Physical parameters
Mounting: 30.5 x 30.5 mm, Φ4 mm with Φ3 mm rubber grommets
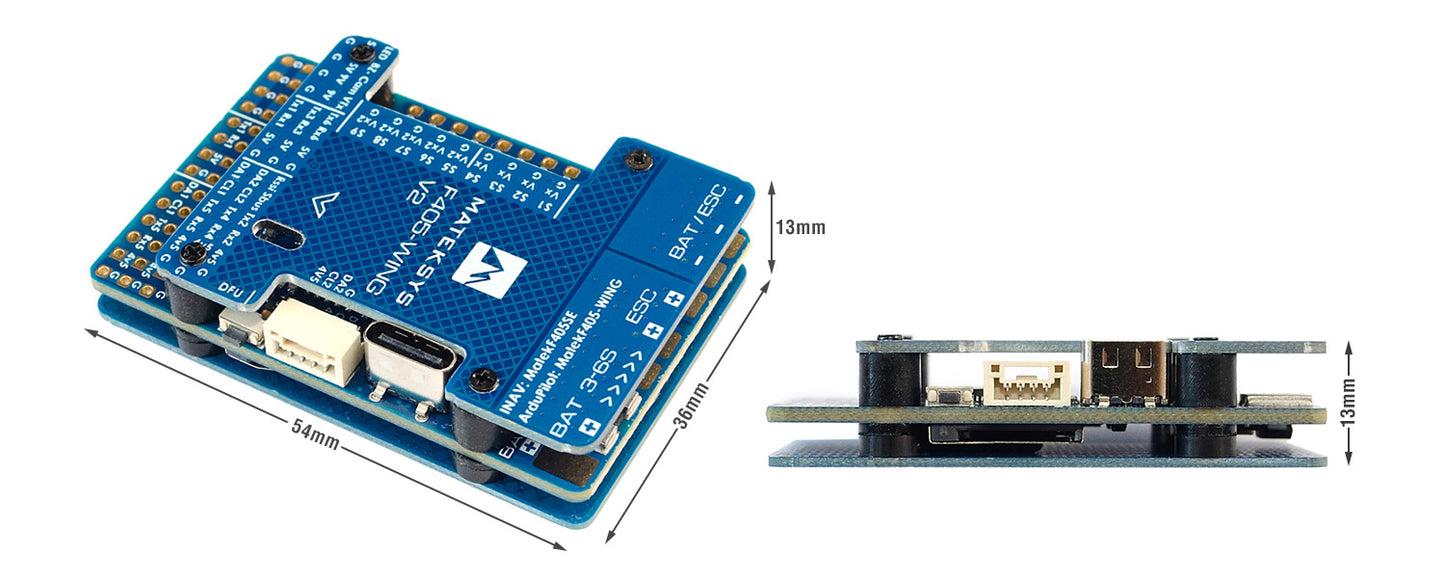
Dimensions: 54 x 36 x 13 mm
Weight: 25 g
Package contents:
1x F405-Wing-V2
1x 20cm JST-GH-4P to JST-GH-4P cable for I2C port
Dupont 2.54 pins
Let customers speak for us
Was easy and good fit for my Era mini 3.5 drone 😜


Works great and matches expectations


Puikūs, gerai laikosi,lengvai užsideda. 10/10

Puikūs įrankiai, daug skirtingų galvučių

Labai gera antena, jaučiasi ryšio kokybės pagerėjimas


pirkau ant tinywhoop signalui gerint, siek tiek ilgesne nei tikejaus bet tiko






