


- Description
- Related Files
- Discussion
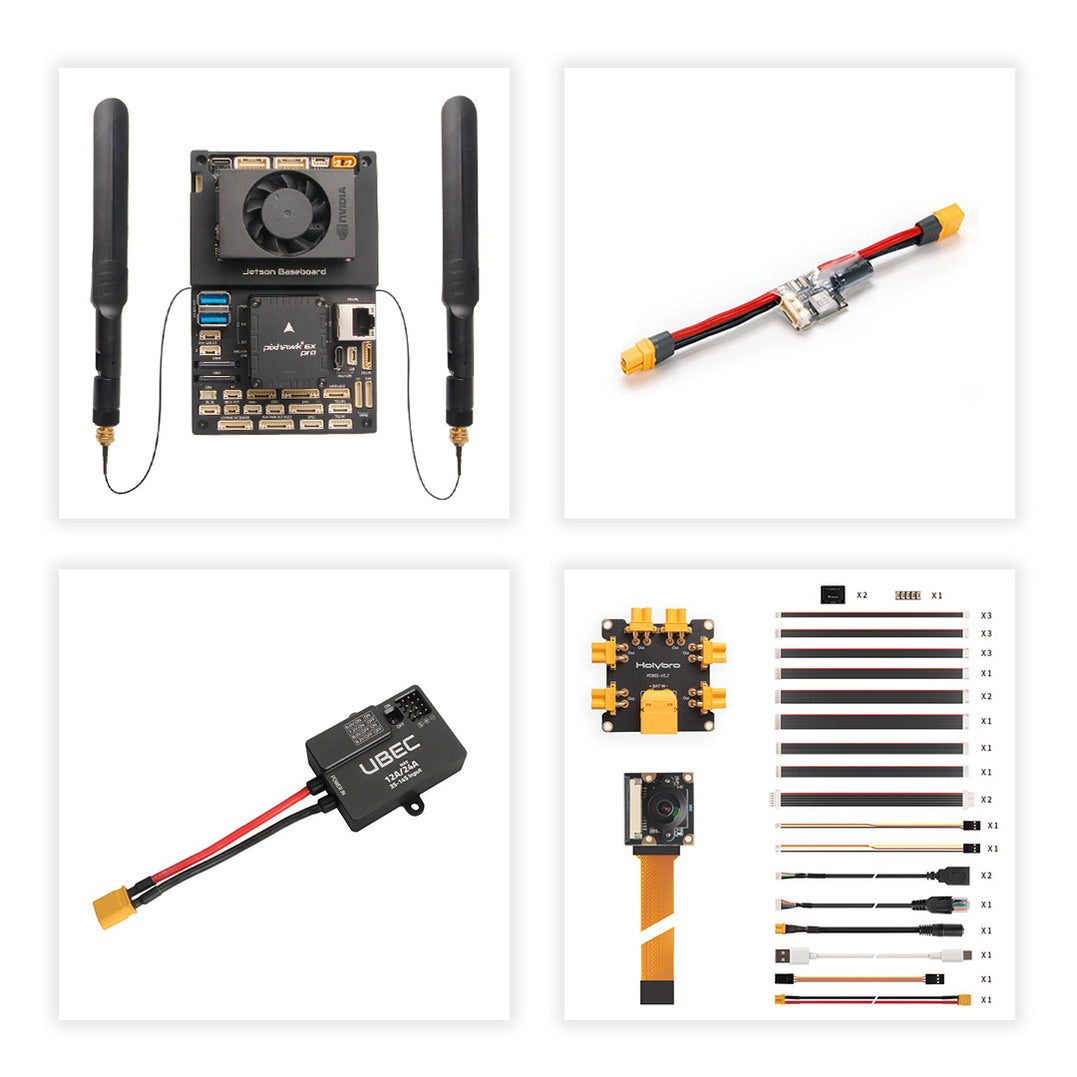
Holybro Pixhawk Jetson 6X Pro Motherboard Kit The Holybro Pixhawk Jetson motherboard is based on the open-source Pixhawk Autopilot Bus specification and the NVIDIA Jetson Orin NX/Nano carrier board. The Pixhawk Autopilot Bus (PAB) format allows use with any PAB flight controller such as the Pixhawk 6X. Features: - Combines the performance of Pixhawk and Nvidia Jetson in a single board; - Jetson & Pixhawk connectivity via UART, CAN and Ethernet switch; - Pixhawk Autopilot Bus (PAB) format; - Compatible with Jetson Orin NX & Orin Nano; - 2x M.2 slot: Key A/E for WiFi/Bluetooth & Key M for NVMe SSD. Processors and sensors: FMU processor: STM32H753 - 32-bit Arm® Cortex®-M7, 480 MHz, 2 MB flash, 1 MB RAM IO processor: STM32F103 - 32-bit Arm® Cortex®-M3, 72 MHz, 64 KB SRAM Integrated sensors (current version Rev8): - Accelerometer/gyroscope: 3× ICM-45686 (with BalancedGyro™ technology) - Barometer: ICP20100 & BMP388 - Magnetometer: BMM150 Motherboard ports and connections: 2x Gigabit Ethernet port - Connected to both Jetson and Autopilot via RTL8367S switch - Powered by Pixhawk circuit - 8pin JST-GH and RJ45 2x input for MIPI CSI cameras (4 lines each, 22pin FFC Raspberry Pi) 2× USB 3.0 Host (USB-A, 1.5 A) 2× USB 2.0 Host (5pin JST-GH, 1.0A) USB 2.0 for programming/debugging (USB-C) Key M 2242/2280 for NVMe SSD (PCIEx4) Key E 2230 for WiFi/Bluetooth (PCIEx2, USB, UART, I2S) Mini HDMI output 4x GPIO (6pin JST-GH) CAN port (CAN2, 4pin JST-GH) SPI port (7pin JST-GH) I2C port (4pin JST-GH) I2S port (7pin JST-GH) 2× UART port (1 for debug, 1 for Autopilot telem2) Fan power supply IMU: IIM42652 Power supply: - XT30 connector - Voltage: 7-21V (3S-4S) - Separate power circuits for flight safety - Holybro UBEC 12A (3-14S) can be used for higher input voltage - The board's built-in BEC can only handle 7-21V (3S-4S), the use of UBEC 12A is recommended as a backup Power Requirements: - Min. 8 V / 3 A (depends on peripherals) Autopilot connectors: Pixhawk Autopilot Bus Interface - 100pin and 50pin Hirose DF40 Backup digital power inputs - I2C voltage measurement support - 2× 6pin Molex CLIK-Mate - Power selector with overvoltage protection Max. input voltage: 6V USB input: 4.75-5.25V GPS and security button (10pin JST-GH) Second GPS port (6pin JST-GH) 2× CAN port (4pin JST-GH) 3× Telemetry with flow control (2× 6pin JST-GH, 1 connected to UART1 Jetson) 16 PWM outputs (2× 10pin JST-GH) UART4 & I2C (6pin JST-GH) AD & IO (8pin JST-GH) USB 2.0 (USB-C, 4pin JST-GH) DSM input (3pin JST-ZH 1.5mm) RC input (PPM/SBUS, 5pin JST-GH) SPI for external sensors (11pin JST-GH) 2x Debug port (1x for FMU, 1x for IO, 10pin JST-SH) Dimensions (without Jetson and FC): 126 x 80 x 38 mm Weight: 203.2g (with Jetson, cooler, FC, SSD, WiFi) UBEC-12A Specifications: Input voltage: 3-14S (XT30) Output voltage: 6.0V / 7.2V / 8.0V / 9.2V (recommended 7.2V for Jetson) Output current: - Permanent: 12 A - Peak: 24 A Dimensions: 48 x 33.6 x 16.3 mm Weight: 47.8 g The package contains: 1 × Pixhawk 6X Pro Flight Controller 1 × Pixhawk Jetson Orin Motherboard (with heatsink or without case) 1 × Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) with cooler and fan 1 x SSD: Samsung PM9B1 PCIe 4.0 NVMe 512 GB 1 × Wi-Fi & Bluetooth module: Intel 8265NGW AC Dual Band or Realtek RTL8B22CE 1 × Camera: IMX219-200 1 × PM02D Power Module 1 x UBEC 12A (3-14S) 1 x PDB board 1 × Set of cables
Let customers speak for us
Was easy and good fit for my Era mini 3.5 drone 😜
Gedas Mo

ESC 4-in-1 FLYWOO GOKU G45M 32BIT 2-6S 45A AM32 20x20

Works great and matches expectations
Mindaugas

TX Module RadioMaster Nomad Dual 1-watt Gemini Xrossband ExpressLRS Module

Puikūs, gerai laikosi,lengvai užsideda. 10/10
Justas Leonavičius

Filter Set iFlight O4 Air Unit Pro (UV Filter, ND8, ND16, ND32)
Puikūs įrankiai, daug skirtingų galvučių
Anonymous

Sada Magnetických Nástrojů Na Opravu Elektroniky Black (Skit M-115)
Labai gera antena, jaučiasi ryšio kokybės pagerėjimas
Anonymous

Antenna Foxeer Lollipop 4 Straight SMA RHCP 160mm Black

pirkau ant tinywhoop signalui gerint, siek tiek ilgesne nei tikejaus bet tiko
Paulius

Antenna RushFPV Cherry UFL 5.8G RHCP





